Systema translationis quadridimensionalis ad onus grave applicandum
Descriptio
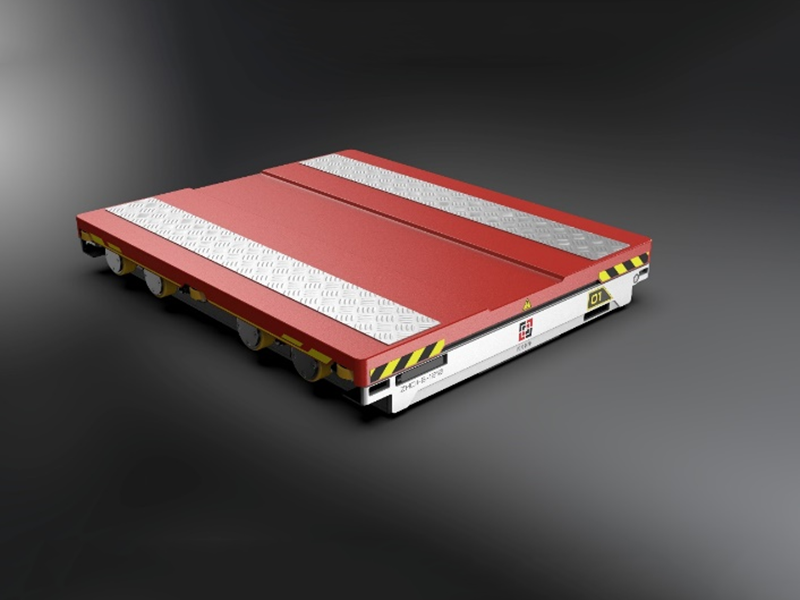
Quasi instrumentum principale systematis densi repositionis intelligentis, navicula quadridimensionalis (4D-shuttle) praecipue constat ex combinatione chassis, systemate electrico, systemate potentiae, systemate impulsionis, systemate elevationis, systemate sensorio, et cetera. Quinque modos habet: moderationem remotam, manualem, semi-automaticum, automaticum localem, et automaticum interretialem. Multis praesidiis securitatis et monitis securitatis, alarmis securitatis regionalibus, alarmis securitatis operationalibus, et alarmis securitatis interactivis praeditum est. Capsulae per soldaduram gaso protectam et clavos altae firmitatis connexae sunt. Combinatio cratium structuram duplicis strati habet. Aspectus totus colore insperso pictus est, et partes machinatae et fulcra electrica galvanoplastica sunt. Duo systemata impulsionis et duo systemata elevationis habet. Systemata impulsionis directiones XY curant. Unum systematum elevationis curat elevationem onerum, alterum commutationem inter vias primariam et secundariam. Directio altitudinis Z mutationem strati naviculae quadridimensionalis per usum elevatoris ad singulorum necessitates efficere potest, ut functio accessus spatii tridimensionalis efficiatur.
Structura typi oneris gravis fere eadem est ac versionis ordinariae. Praecipua differentia est capacitatem oneris magnopere auctam esse, et capacitatem portandi fere duplo maiorem quam versionis ordinariae attingere. Designatio oneris ferendi mechanismi elevandi roborata est, et vis motoris elevandi aucta est ut capacitas oneris ferendi ad 2.5T pervenire possit. Vis motoris mobilis immutata manet. Ad productionem augendam, proportio reductionis augetur, et celeritas cursus vectoris 4D proinde minuetur.
negotium ordinarium
Complectens et conservans acceptilationes extra horreum
Stratum mutationis relocationis et imputationis inventarii
Parametri Technici
| proiectum | Data fundamentalia | Nota | |
| exemplar | SX-ZHC-T-1210-2T | ||
| Ferculum applicabile | Latitudo: 1200mm Profunditas: 1000mm | ||
| Onus maximum | Maximum 2500 kg | ||
| altitudo/pondus | Altitudo corporis: 150mm, Pondus vecturae: 350KG | ||
| Ambulatio principalis directionis X | celeritas | Maximum onus sine onere: 1.5 m/s, maximum onus plenum: 1.0 m/s | |
| acceleratio ambulationis | ≤ 1.0m/S2 | ||
| motor | Motor Servo Sine Penicillo 48VDC 1.500W | Servo importatus | |
| Moderator servi | Impulsor Servorum Sine Penicillis | Servo importatus | |
| Ambula in directionem Y | celeritas | Maximum sine onere: 1.0m/s, maximum plenum onere: 0.8 m/s | |
| acceleratio ambulationis | ≤ 0.6m/S2 | ||
| motor | Motor Servo Sine Penicillo 48VDC 1500W | Servo importatus | |
| Moderator servi | Impulsor Servorum Sine Penicillis | Servo importatus | |
| sublatio mercium | Altitudo elevationis | 30 mm _ | |
| motor | Motor sine spazzolis 48VDC 750W | Servo importatus | |
| elevatio principalis | Altitudo elevationis | XXXV millimetra | |
| motor | Motor sine spazzolis 48VDC 750W | Servo importatus | |
| Canalis principalis/modus positionis | Positio ambulandi: positio codicis numerici / positio laseris | Germania P+F/SICK | |
| Canalis secundarius/modus positionis | Positio ambulandi: photoelectrica + encoder | Germania P+F/SICK | |
| Positio ferculi: laser + photoelectrica | Germania P+F/SICK | ||
| Systema Moderationis | Moderator Programmatorius PLC S7-1200 | Germania SIEMENS | |
| imperium remotum | Frequentia operandi 433MHZ, distantia communicationis saltem 100 metra | Importatio ad normam accommodata | |
| Fons potentiae | altilium lithii | Domestica alta qualitas | |
| Parametri pilae | 48V, 30AH, tempus usus ≥ 6h, tempus impletionis 3h, tempora impletionis: 1000 vicibus | Capacitas variari potest secundum magnitudinem vehiculi | |
| Methodus celeritatis moderandae | Imperium servo, momentum torquens constans celeritatis lentae | ||
| Methodus moderationis transversae | Ordinatio WCS, imperium computatri tactilis, imperium telemoderationis | ||
| sonitus operandi | ≤60db | ||
| Requisita pingendi | Combinatio armarii (nigra), operculum superius rubrum, anterius et posterius aluminio albo | ||
| temperatura ambientis | Temperatura: 0℃~50℃Humiditas: 5% ~ 95% (sine condensatione) | ||


