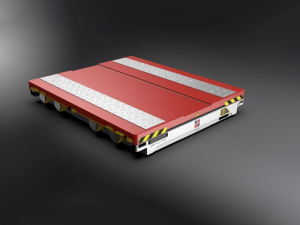
Typus normae naviculae 4D—Secunda generatio

Descriptio Producti
Ut apparatus principalis horrei densi intelligentis quadrivialis, vector quadrivialis praecipue constat ex structura chassis, systemate electrico, systemate potentiae, systemate impulsorio, systemate elevationis, systemate sensorio, et cetera.
Quadridirectionalis vector duobus systematibus impulsoriis et duobus systematibus elevationis constat. Duo systemata impulsoria motum viarum principalium et secundariarum curant. Alter systema elevationis merces elevare et demittere curat, alterum vero impulsum inter vias principalem et secundariam commutat. Motus viarum principalium et secundariarum motoribus servo DC sine spazzolis ad celeritatem regulandam utitur, quod curvam celeritatis lenem et bonam stabilitatem operationis efficit. Instrumenta elevationis tam principalia quam secundaria motoribus DC sine spazzolis utuntur et mechanismo cremoris et rotae ad ascensum et descensum nituntur.
Vehiculum quadridirectionale quinque modos habet: gubernationem remotam, manualem, semiautomaticum, automaticum in vehiculo, et automaticum interretiale.
Plures praesidia securitatis et systemata admonitionis praecocis praebet, inter quae alarmae securitatis regionales, alarmae securitatis operationales, et alarmae securitatis interactivae.

Operatio
Accipiendi Palletizandi Ingrediendi Egrediendi
Translatio Strati Impensae Inventarii Mutationis
Parametri technici
| Res | Data fundamentalia | Nota | |
| Modellum | SX-ZHC-B-1210-1.5T | ||
| Palettae applicabiles | Latitudo: 1200mm Profunditas: 1000mm | ||
| Capacitas oneris maxima | Maximus 1500kg | ||
| Crassitudo/Pondus | Crassitudo corporis: 150 mm Pondus totum vehiculi: 350 KG | ||
| Ambulatio in directione principali X | Celeritas | Celeritas maxima sine onere: 2.0 m/s; celeritas maxima cum onere pleno: 1.5 m/s | |
| Acceleratio ambulandi | ≤ 1.0m/S2 | ||
| Motor | Motor servo sine spazzolis 48VDC 1000W | Servo sine spazzolis | |
| Servomotor | Servomotor sine spazzolis | Servus domesticus | |
| Ambulatio in directione secundaria Y | Celeritas | Celeritas maxima sine onere: 1.2 m/s; Celeritas maxima sub pleno onere: 0.8 m/s | |
| Acceleratio ambulandi | ≤ 0.6m/S2 | ||
| Motor | Motor servo sine spazzolis 48VDC 1000W | Servo sine spazzolis | |
| Servomotor | Servomotor sine spazzolis | Servus domesticus | |
| Levatio oneris | Altitudo elevationis | Triginta millimetra | |
| Motor | Motor sine spazzolis 48VDC 750W | Servus domesticus | |
| Ascensus principalis | Altitudo elevationis | XXXV millimetra | |
| Motor | Motor sine spazzolis 48VDC 750W | Servus domesticus | |
| Canalis principalis/modus positionis | Ambulatio et positio: Positio codicis linearis / Positio laserica | Germanica P+F/SICK | |
| Canalis secundarius/modus positionis | Ambulatio et positio: photoelectrica + encoder | Germanica P+F/SICK | |
| Positio palletarum: laser + photoelectrica | Germanica P+F/SICK | ||
| Methodus moderationis | Moderator Programmatorius PLC S7-1200 | Siemens Germanica | |
| Imperium remotum | Frequentia operandi 433MHz, distantia communicationis saltem 100 metra. | Typus proprius importatus | |
| Modus alimentationis electricae | pilae lithii | Producta domestica altae qualitatis | |
| Parametri pilae | 48V, 30AH, tempus usus ≥6h, tempus impletionis 3h, tempora impletionis: 1000 vicibus | Sine cura | |
| Methodus celeritatis moderandae | Imperium servo, momentum torquens constans celeritatis lentae | ||
| Vectura quadriviariamodi moderationis | Ordinatio WCS, imperium computatrale tactile, imperium telemoderatum | ||
| Gradus sonitus operandi | ≤60db | ||
| Requisita pingendi | Congeries armarii (nigra), operculum superius rubrum, tabulae anteriores et posteriores aluminio albae. | ||
| Temperatura ambientis | Temperatura: 0℃~50℃Humiditas: 5% ~ 95% (non condensans) | ||